主页(http://www.cnwulian.net):盘点激光雷达技术在智能交通上的应用
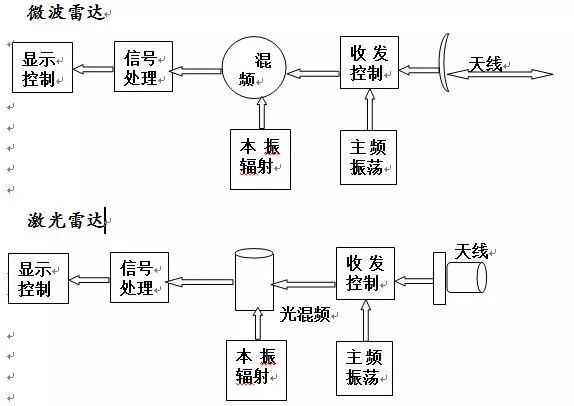
激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图
终端信息处理技术
激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。
目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种:
利用激光雷达进行气象研究
激光雷达应用在汽车及交通运输领域的相关技术
激光雷达的波长比微波短好几个数量级,又有更窄的波束。因此,于微波雷达相比,激光雷达具有如下优点:
2、抗干扰能力强,隐蔽性好;激光不受无线电波干扰,能穿越等离子鞘,低仰角工作时,对地面多路径效率不敏感。激光束很窄,只有在被照射的那一点,那瞬间,才能被接收,所以激光雷达发射的激光被截获的概率很低。
汽车快速成型技术
激光雷达终端信息处理系统的任务是既要完成对各传动机构、激光器、扫描机构及各信号处理电路的同步协调与控制,又要对接收机送出的信号进行处理,获取目标的距离信息,对于成像激光雷达来说还要完成系统三维图像数据的录取、产生、处理、重构等任务。
无人自驾技术
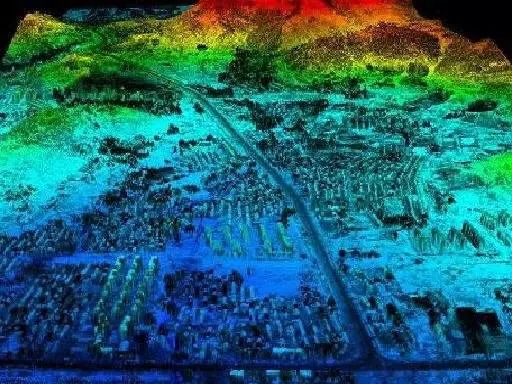
“数字城市”是数字地球技术系统的重要组成部分,而表达城市主要物体的三维模型包括三维地形,三维建筑模型、三维管线模型。这些三维建筑模型是数字城市重要的基础信息之一。
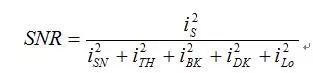
式中, 是信号电流的均方值; 是散弹噪声电流的均方值; 是热噪声电流的均方值; 是背景噪声电流的均方值; 是暗电流的均方值;是本振电流的均方值。
自动泊车系统一般在汽车前后四周安装感应器,这些感应器既可以充当发送器,也可以充当接收器。它们会发送激光信号,当信号碰到车身周边的障碍物时会反射回来。然后,车载计算机会利用其接收信号所需时间确定障碍物的位置。也有部分自动泊车系统采用保险杠上安装摄像头或者雷达来检测障碍物。总的来说其原理是一样的,汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后将车子驶入停车位。
烃类气体是油气田油气微渗漏的主要指示性气体,而近地表的烃类气体从成分上看,主要是由早期的成岩作用、细菌作用和地下热作用等共同作用的结果。共振吸收激光雷达在探测气体分子含量时一般都采用各种可调谐激光器激光雷达探测气体的探测灵敏度,是指激光雷达所能接收到的激光功率细微变化的能力。探测的距离和被测气体分子的吸收截面是影响探铡灵敏度的主要因素。据研究资料介绍,吸收截面越大灵敏度越高;而探测距离越大,灵敏度越高。而路径与灵敏度之间的关系是路径越长,气体分子对激光光束的吸收衰减也越强烈,从而使探测灵敏度大大提高。但是,由于存在着激光光斑的发散和因大气湍流引起的激光传输方向改变的抖动效应,将使激光的有效利用率减小,即信噪比下降,从而影响污染气体分子含量的探测精度。因此探测距离以数公里为宜。
激光雷达与微波雷达比较
激光雷达探测原理
按功能分:有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像雷达,激光目标指示器和生物激光雷达等。
当然,激光雷达也有如下缺点:
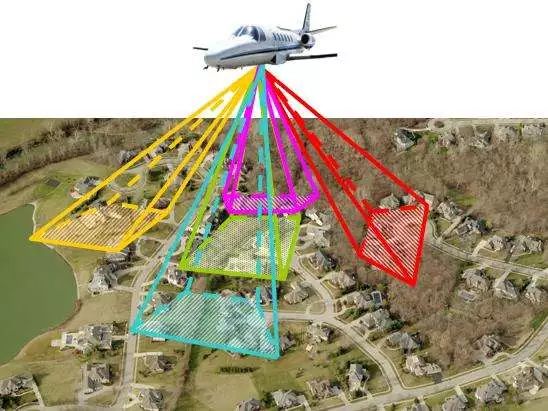
激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。
按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
按用途分:有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。
ACC系统包括雷达传感器、数字信号处理器和控制模块。司机设定预期车速,系统利用低功率雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速,使车辆和前车保持一个安全的行驶距离。当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。主动巡航控制系统代替司机控制车速,避免了频繁地取消和设定巡航控制,使巡航系统适合于更多的路况,为驾驶者提供了一种更轻松的驾驶方式。
自动泊车技术
1、角分辨率高,速度分辨率高和距离分辨率高。采用距离-多普勒成像技术可以得到运动目标的高分辨率的清晰图象。
非相干激光雷达的信噪比SNR方程可以表示为:
相干激光雷达的信噪比SNR方程表示为:
背景噪声
在斯坦福研究所开发的第一个比较原始的仪器设计清楚地表明了激光雷达的应用,如通过雨水或底层的云的结构探测云和雾层的位置,上升限度的高度。激光雷达回波可以清楚的从低海拔地区观察到一个清晰的连续气溶胶层,而这对于肉眼来说是不可见。

阈值检测电路是一个脉冲峰值比较器,确定回波到达的判据是回波脉冲幅值超过阈值。这种方法的优点是简单,但存在两个主要缺点。首先,只要有一个脉冲幅值首先超越阂值,检测电路就会将其确定为回波,而不管它是同波脉冲还是杂波干扰脉冲,从而导致虚警;其次是回波脉冲幅度的变化会引起到达时间的误差,从而导致测距误差。在高精度激光测距机中,通常采用峰值采样保持电路和恒比定时电路来减小测时误差。
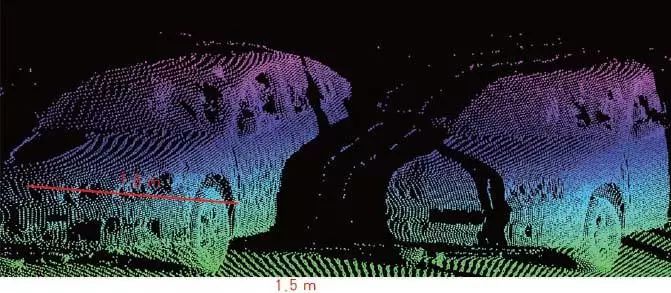
运用三维激光扫描仪对事故现场进行三维扫描,现场取证,扫描仪的数据能够生成事故现场的高质量图像和细节示意图,便于后期提取调查和法庭审理。
机械扫描能够进行大视场扫描,也可以达到很高的扫描速率,不同的机械结构能够获得不同的扫描图样,是目前应用较多的一种扫描方式。声光扫描器采用声光晶体对入射光的偏转实现扫描,扫描速度可以很高,扫描偏转精度能达到微弧度量级。但声光扫描器的扫描角度很小,光束质量较差,耗电量大,声光晶体必须采用冷却处理,实际工程应用中将增加设备量。
气体激光器是目前种类较多、输出激光波长最丰富、应用最广的一种激光器。其特点是激光输出波长范围较宽;气体的光学均匀性较好,因此输出的光束质量好,其单色性、相干性和光束稳定性好。
